Machine Learning
<- Return to all blogs
-
Announcing our 2023 Geospatial Tech Radar
Ahead of this year’s FOSS4G North America gathering, we’re rolling out a 2023 edition of our Geospatial Tech Radar idea, which we plan to update annually to track what’s up-and-coming in geospatial techniques, standards, data, and tools/platforms.
-
Announcing our 2023 Geospatial Tech Radar
Ahead of this year’s FOSS4G North America gathering, we’re rolling out a 2023 edition of our Geospatial Tech Radar idea, which we plan to update annually to track what’s up-and-coming in geospatial techniques, standards, data, and tools/platforms.В

-
Running ROCm 5.4.2, ONNX, and PyTorch on a SteamDeck
In this blog post, we’ll guide you through setting up ROCm 5.4.2, ONNX, and PyTorch on a SteamDeck.
-
Streamlining search-and-rescue operations using machine learning on the edge
In this blog, we discuss various improvements that we have made to the proposed workflow first discussed in our previous blog post focused on edge processing of drone imagery for search-and-rescue.

-
Exploring unsupervised change detection with Sentinel-2 vector embeddings
In this blog post, we explore the application of a foundation model pre-trained on Sentinel-2 imagery, to the downstream task of change detection.В
-
Edge Processing of Drone Data for Search and Rescue using Open Source Tooling on an AWS Snowcone
Element 84 has developed near real-time edge processing of drone and aerial imagery for human identification that leverages machine learning and AWS Snowcone edge capabilities during austere operations for search and rescue applications.

-
Unleashing the Power of Geospatial AI: Elevating our Machine Learning Offerings
We outline recent projects tackling complex challenges through the lens of Machine Learning and discuss how our past experience will shape future work.

-
Introducing: Raster Vision v0.20
We outline Raster Vision V0.20, introducing new features, improved documentation, and an entirely new way to use the project.
-
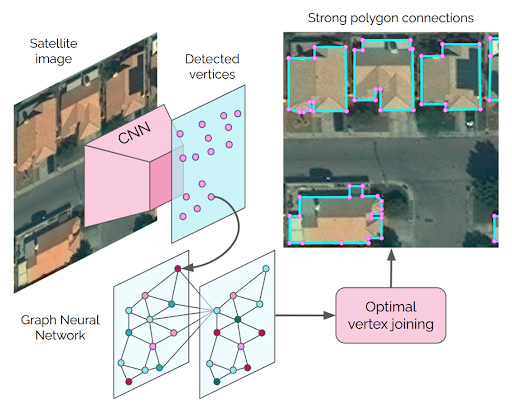
Automated Building Footprint Extraction (Part 3): Model Architectures
Reviewing model architectures for building footprint extraction including naive approaches, model improvement strategies, and recent research.
-
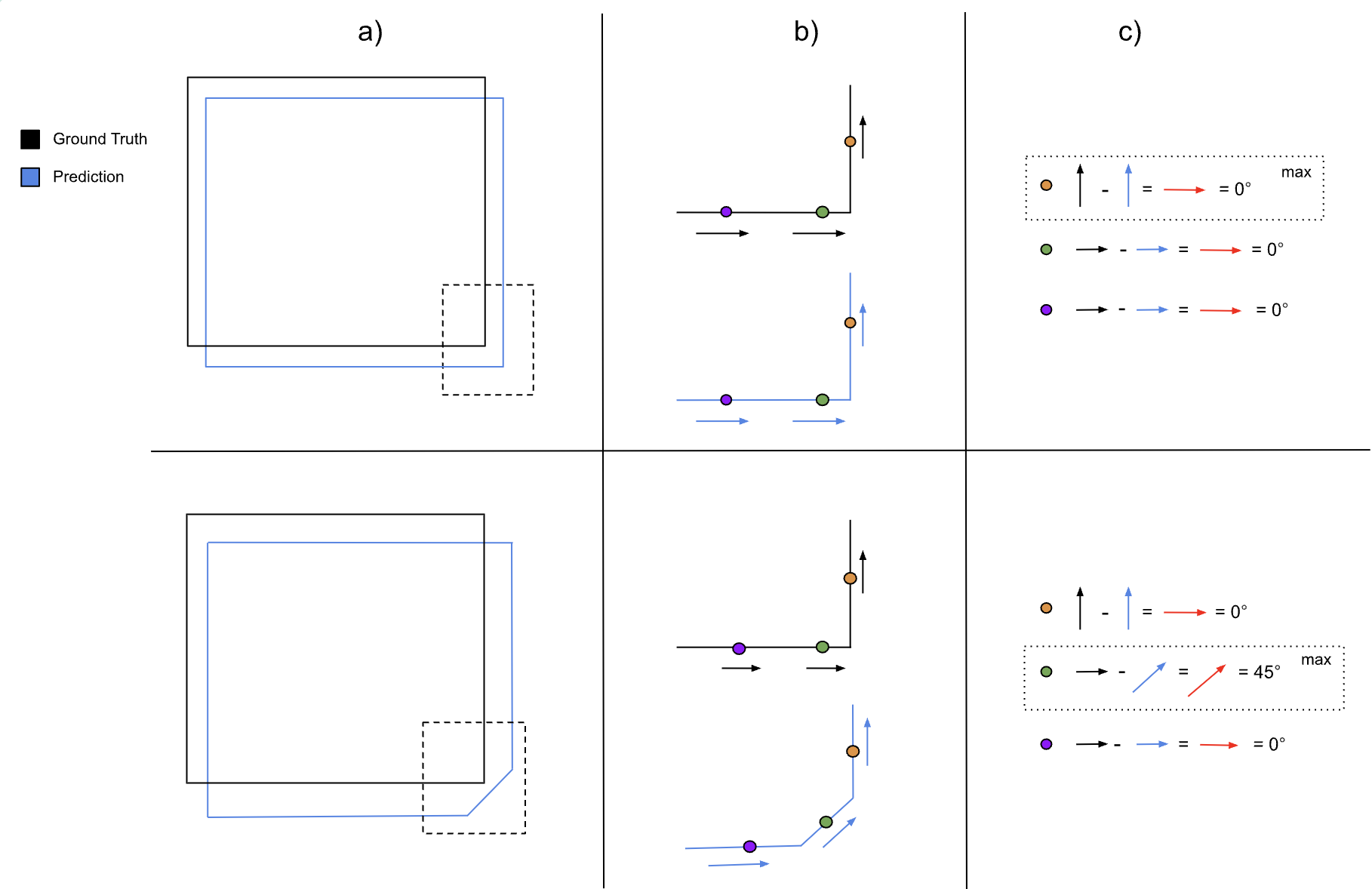
Automated Building Footprint Extraction (Part 2): Evaluation Metrics
In the second part of our Automated Building Footprint Extraction series, we review some evaluation metrics for building footprint extraction.
-
Automated Building Footprint Extraction (Part 1): Open Datasets
In the first installment of this three-part blog series, we summarize some of the latest research on automated building footprint extraction.
